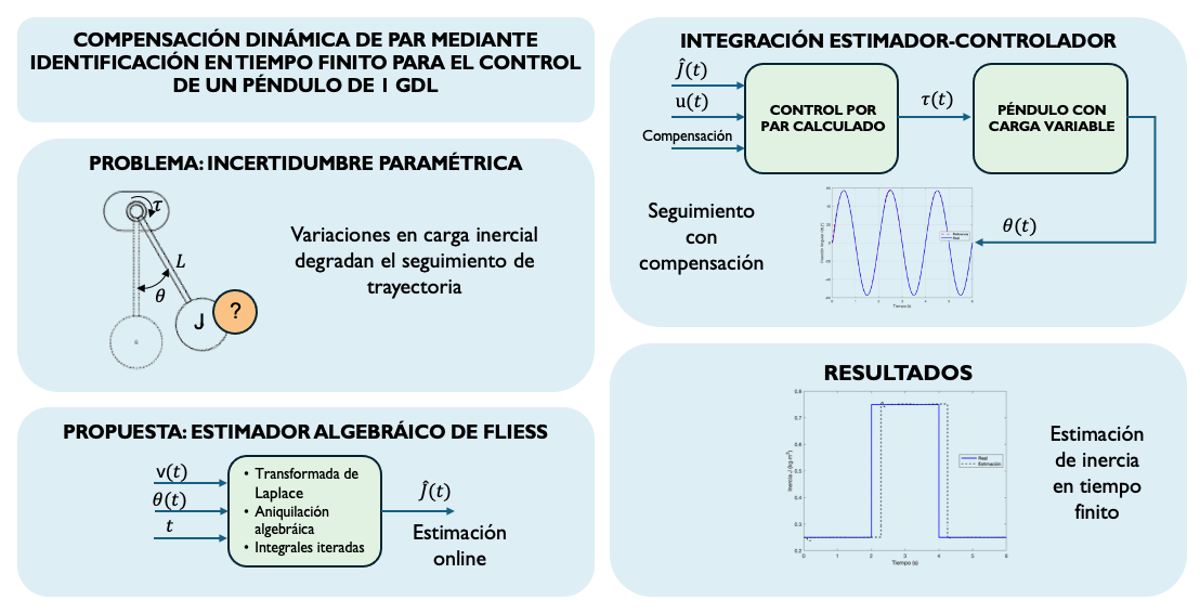
Compensación dinámica de par mediante identificación en tiempo finito para el control de un péndulo de un grado de libertad
Palabras clave:
técnica de Fliess, incertidumbre dinámica, métricas de desempeño, principio de certeza equivalente, aniquilación algebraicaResumen
Este trabajo aborda el problema de la incertidumbre paramétrica en la iner- cia de sistemas mecánicos no lineales, centrando el estudio en un péndulo de un solo eslabón sometido a variaciones dinámicas de carga. El objetivo principal es garantizar la robustez del seguimiento de trayectoria mediante la integración de una técnica de identificación algebraica propuesta por Fliess y un esquema de control por par calculado. La metodología se fundamenta en la manipulación de las ecuaciones diferenciales en el dominio complejo de Laplace, aplicando operadores de aniquilación para eliminar la dependencia de las condiciones iniciales desconocidas. Mediante el uso de integrales iteradas, el estimador logra aislar el valor de la inercia en tiempo finito, proporcionando una señal filtrada y robusta ante el ruido sensorial que caracteriza a los sensores reales. Para validar la propuesta, se realizaron simulaciones numéricas en MATLAB con un tiempo de muestreo de un milisegundo, evaluando métricas críticas como el error cuadrático medio (RMSE) y la integral del error absoluto ponderado por el tiempo (ITAE). Los resultados demuestran que el controlador adaptable logra una mejora superior al 68% en la precisión del seguimiento y una reducción del 90 % en el error acumulado en comparación con un control nominal de parámetros fijos. El sistema demostró una transición eficiente de perturbaciones internas oscilatorias continuas a respuestas transitorias mínimas de forma triangular, confirmando que la actualización paramétrica en línea permite mantener la estabilidad y el desempeño invariante del lazo cerrado frente a cambios estructurales imprevistos en el hardware operativo.
Referencias
Bhattacharyya, S. P. (2017). Robust control under parametric uncertainty: An overview and recent results. Annual Reviews in Control, 44, 45-77. https://doi.org/10.1016/j.arcontrol. 2017.05.001
Chen, C., Zhang, W., Liu, T., Zhang, Z., Lu, W., Wang, L., Zheng, Y., & Lin, Z. (2023). Online identification of inertial parameters of a robot with partially combined links using IMU sensing. Mechatronics, 17(94), 103023. https://doi.org/10.1016/j.mechatronics.2023. 103023
Cheng, J., Wang, R., Yu, Z., Wu, F., Kong, S., Shao, J., & Yu, J. (2025). Methods for inertial parameters identification of manipulator based on multibody dynamics and neural networks. Advances in Mechanical Engineering, 17(2). https://doi.org/10.1177/ 1687813225132105
Chu, Z., Ma, Y., Hou, Y., & Wang, F. (2017). Inertial parameter identification using contact force information for an unknown object captured by a space manipulator. Acta Astronautica, 131, 69-82. https://doi.org/10.1016/j.actaastro.2016.11.019
Fliess, M., & Sira-Ramirez, H. (2003). An algebraic framework for linear identification. ESAIM: Control, Optimisation and Calculus of Variations, 9, 151-168. https://doi.org/10.1016/j. actaastro.2016.11.019
Fliess, M., & Sira-Ramírez, H. (2008). Closed-loop Parametric Identification for Continuous- time Linear Systems via New Algebraic Techniques. En H. Garnier & L. Wang (Eds.), Identification of Continuous-time Models from Sampled Data. Advances in Industrial Control (pp. 363-391). Springer-Verlag. https://doi.org/10.1007/978-1-84800-161-9_13
Karlova-Sergieva, V. (2025). Robust Performance Assessment of Control Systems with Root Contours Analysis. Cybernetics and Information Technologies, 25 (2), 83-99. https://doi.org/10.2478/cait-2025-0013
Khatib, O. (1995). Inertial Properties in Robotic Manipulation: An Object-Level Framework. The International Journal of Robotics Research, 14(1), 19-36. https://doi.org/10.1177/027836499501400103
Leboutet, Q., Roux, J., Janot, A., Guadarrama-Olvera, J. R., & Cheng, G. (2021). Inertial Parameter Identification in Robotics: A Survey. Applied Sciences, 11(9), 4303. https://doi.org/10.3390/app11094303
Resende, D., de Morais, M., & Avila, S. (2020). Experimental Analysis of One-Degree-of- Freedom (1DoF) Dynamic System Controlled by Optimized Inverted Pendulum. Journal of Vibration Engineering and Technologies, 8, 471-481. https://doi.org/10.1007/s42417- 020-00198-2
Sands, T. (2025). Autonomous Real-Time Mass Center Location and Inertia Identification for Grappling Space Robotics. Technologies, 13(4), 148. https://doi.org/10.3390/ technologies13040148
Tolasa, D. G. (2025). Theoretical Analysis of a Simple Pendulum Experiment. International Journal of Current Research in Science, Engineering and Technology, 8(1), 214-218. https://doi.org/10.30967/IJCRSET/Diriba-Gonfa-Tolasa/168
Xia, Y., Wang, Y., Chen, Y., Shi, J., Yang, W., Y.and Li, & Li, K. (2025). A Cooperative Adaptive VSG Control Strategy Based on Virtual Inertia and Damping for Photovoltaic Storage System. Energies, 18(6), 1505. https://doi.org/10.3390/en18061505
Zhou, R., Zhao, T., Yang, H., & Su, Q. (2025). Online Dynamic Parameter Identification Approach for Robotic Manipulator With Reformulated Physical Feasibility. IEEE Transactions on Instrumentation and Measurement, 14(0), 1-14. https://doi.org/10. 1109/TIM.2025.3573017